Palettierroboter für Säcke
Das Palettieren von Säcken ist eine anspruchsvolle Aufgabe. Doch durch einen speziellen Greifertyp kann ein Palettierroboter auch diese Produkte problemlos greifen. Dabei sollte man bei diesen Produkten ein besonderes Augenmerk darauf legen, dass der Roboter sie ohne Beschädigung und formstabil aufnimmt. Deshalb sind herkömmliche Methoden, wie das Saugen per Vakuumgreifer oder das Klemmen, nicht geeignet. Auch die Ablage auf der Palette erfordert etwas mehr Fingerspitzengefühl, um ein sauberes Packschema der Säcke auch nach einigen Lagen zu erhalten.
Egalisierte Säcke

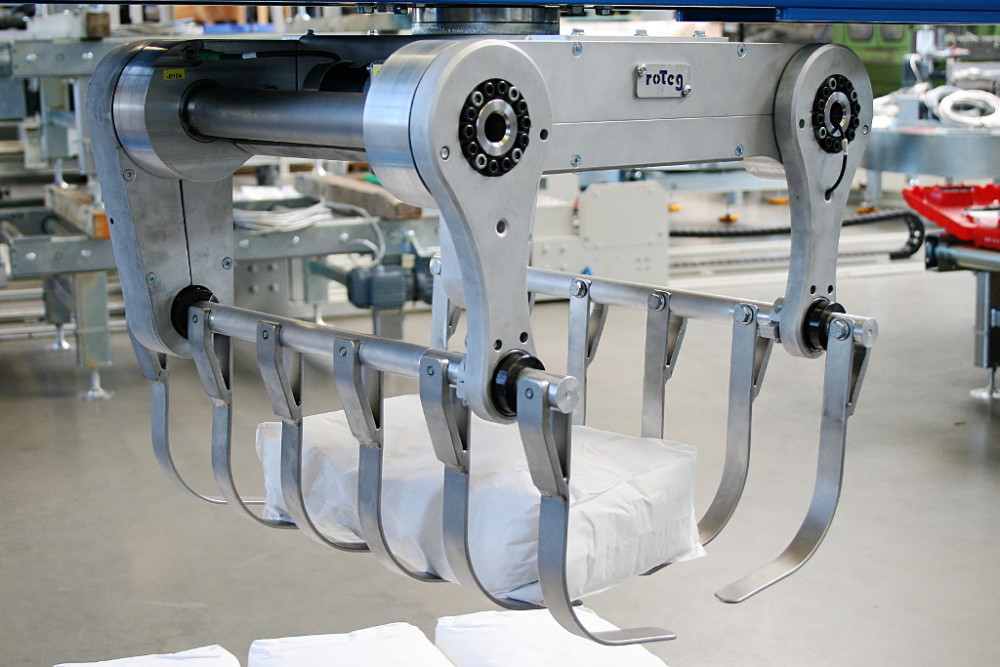
Greifer für Säcke
Schon zur Vorbereitung der Palettierung ist je nach Produkt eine Egalisierung notwendig. Das bedeutet, die Säcke werden abhängig von den Produkteigenschaften durch Rütteln oder Pressen geglättet. Danach sind die Packstücke für das Palettieren vorbereitet. Dennoch erfordert die Handhabung eine besondere Vorsicht, da die Produkte nicht formstabil sind und sich der Inhalt der Säcke bewegt.
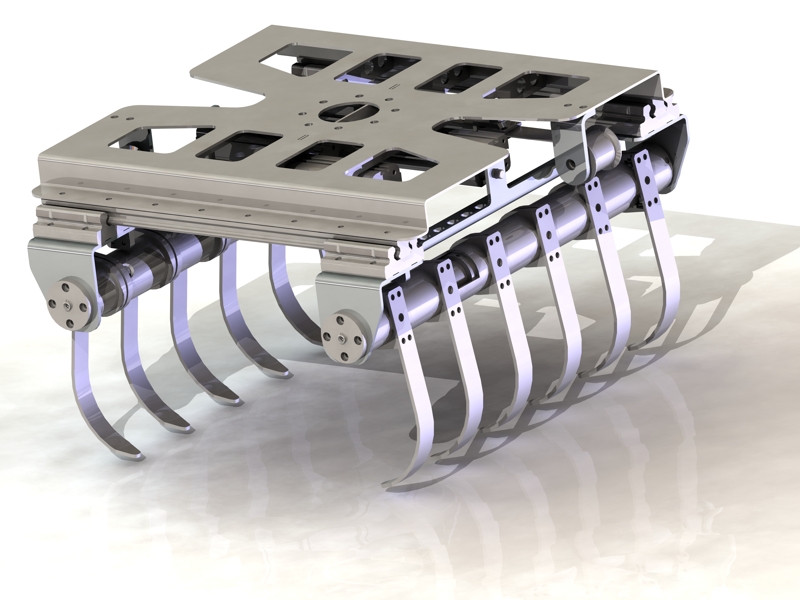
Greifmethoden
Der Greifer für Sackwaren ist mit Greifzangen ausgestattet, die sich in einer kreisförmigen Bewegung öffnen und schließen lassen und gleichzeitig zusammenfahren können. Dabei steuern Servomotoren die Bewegung im Greifer. So verläuft diese absolut synchron. Nur diese Technik erlaubt das schonende Greifen, ohne die Form zu verändern. Die Greifzangen zielen bei der Aufnahme zwischen die Rollen der Fördertechnik und heben das Packstück heraus. Durch die Anzahl der Greifzangen und deren Dimension geht der Greifer auf die Gewichtsverteilung und das Produktverhalten ein. Selbst Säcke unterschiedlicher Größe oder Egalisierung kann man auf diese Weise verarbeiten. Auch beim Ablegen bleibt die Ablageposition der benachbarten Produkte unverändert.
Merkmale dieser Palettieraufgabe:
Videobeispiel: